Physical AI, 시뮬레이션과 현실의 이중 학습으로 프로덕션 시대 진입
by DD
1개월 전
조회수 12
Morgan Stanley 전망에 따르면 2050년까지 5조 달러 규모의 시장을 형성할 것으로 기대되는 Physical AI 분야에서 로보틱스, 자율주행, 드론 등 물리적 세계와 직접 상호작용하는 지능형 에이전트를 의미함\n• NVIDIA Isaac Sim과 Isaac Lab 기반 시뮬레이션 환경에서 수천 개 병렬 시나리오로 대규모 강화학습을 수행하여 개발 비용과 시간을 줄임\n• 시뮬레이션과 실제 학습의 이중 경로 구조를 통해 sim-to-real 간 격차를 줄이고 지속적으로 모델을 다듬어 나감\n• AWS IoT Greengrass로 엣지 디바이스(NVIDIA Jetson Thor)에 모델을 배포하고, Amazon SageMaker AI로 운영 데이터를 기반으로 다시 학습하는 폐쇄 루프 구조를 이루고 있음\n• 도메인 랜덤화와 포괄적 센서 피드백을 통해 실제 물리 세계의 복잡성을 시뮬레이션에 반영하는 것이 핵심 과제로 꼽
Sim-to-Real Gap: 시뮬레이션의 한계와 현실 학습의 필요성
본 아키텍처의 핵심 과제는 시뮬레이션-현실 격차(Sim-to-Real Gap)를 해소하는 것이다. 시뮬레이션은 비용 효율적인 대규모 실험을 가능하지만, 실제 물리의 전체 복잡성을 포착하지 못한다.
마찰 변화, 재료 변형, 센서 노이즈: Isaac Sim에서 근사하는 물리 파라미터와 실제 환경 간의 미세한 차이가 누적되어 배포 후 성능 저하를 유발함
동적 환경 요인: 작업자 이동, 조명 변화, 부품 공차 편차 등은 시뮬레이션에서 예측하기 어렵고, 프로덕션에서만 드러나는 엣지 케이스(Edge Case)임
센서 피드백 기반 정제: 힘 센서, 관절 인코더, 카메라, 가속도계 등 멀티모달 센싱(Multimodal Sensing) 데이터를 수집하여 시뮬레이션 모델을 보정하는 선순환 구조가 필수적임
따라서 이중 경로 아키텍처는 시뮬레이션을 빠른 프로토타이핑 도구로 활용하되, 실제 배포와 지속적인 모델 정제를 통해 격차를 줄여나가는 접근법을 채택한다.
NVIDIA Isaac 생태계: 시뮬레이션 학습 프레임워크 비교
본문에 따르면 NVIDIA Isaac은 Isaac Sim과 Isaac Lab 두 핵심 구성요소로 이루어져 있으며, 각각 고유한 역할을 수행합니다.
Isaac Sim: NVIDIA Omniverse를 기반으로 한 물리 시뮬레이션 환경으로, 로봇의 운동학 모델링, 물리적 제약 조건 설정, 디지털 트윈 생성을 담당합니다. AI 기반 로봇의 설계, 테스트, 합성 데이터 생성을 위해 최적화된 GPU 가속 시뮬레이션을 제공합니다.
Isaac Lab: Isaac Sim 위에 구축된 로봇 학습 프레임워크로, 강화학습과 모방학습을 통해 정책을 훈련합니다. 수천 개의 병렬 시나리오로 대규모 병렬 훈련을 확장할 수 있습니다.
기존 시뮬레이션 도구(Gazebo, Webots)와 비교할 때, Isaac Sim은 Omniverse의 렌더링 인프라를 활용하여 시각적 사실성이 높고, Isaac Lab은 단일 프레임워크에서 다양한 학습 알고리즘을 지원하여 시제품 개발 속도를 높입니다.
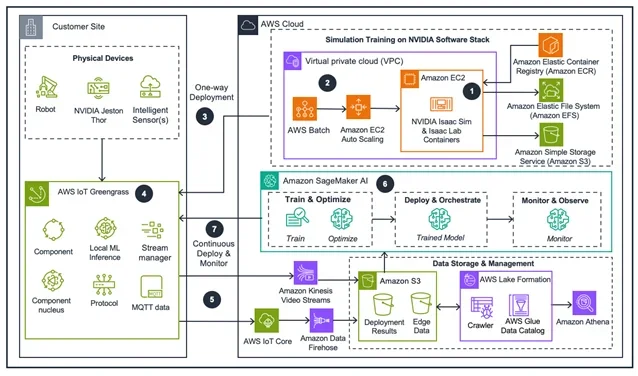
AWS 인프라 기반 엣지-클라우드 협업 아키텍처
본 아키텍처는 엣지-클라우드 협업(Edge-Cloud Collaboration) 모델을 구현하며, 각 계층이 명확한 역할을 분담한다.
시뮬레이션 훈련 루프: GPU 기반 Amazon EC2 인스턴스에서 Isaac Sim/Lab이 실행되고, AWS Batch가 Auto Scaling 그룹을 통해 GPU 리소스를 동적으로 프로비저닝한다. 훈련된 모델은 Amazon S3에 저장되고 컨테이너 이미지는 Amazon ECR로 관리된다.
실제 환경 학습 루프: AWS IoT Greengrass가 엣지 디바이스(NVIDIA Jetson Thor)에서 실시간 추론과 센서 데이터 수집을 동시에 수행한다. 센서 텔레메트리(MQTT)는 AWS IoT Core와 Amazon Data Firehose를 통해 S3 데이터 레이크로 적재되고, 영상 데이터는 Amazon Kinesis Video Streams로 캡처된다.
지속적 개선: Amazon SageMaker AI가 운영 데이터를 배치 처리하여 모델을 재학습하고, 개선된 모델은 다시 IoT Greengrass를 통해 재배포되는 폐쇄 루프(Closed-Loop) 구조를 형성한다.
이 아키텍처의 장점은 시뮬레이션과 실제 학습 루프가 병렬로 작동하며 서로 보완한다는 점이다.
산업 조립 사례: Peg-in-Hole 작업에서의 강화학습 적용
{
"text": "본문에서 제시하는 사용 사례는 좁은 공차 기어 부품 삽입(Contact-Rich Manipulation) 작업으로, 접촉 힘에 실시간으로 반응하는 정교한 제어가 필요한 상황이다.\n• 시뮬레이션 단계: Isaac Sim에서 UR 로봇 팔, 워크피스 형상, 조립 지그를 모델링하고 마찰 계수, 접촉 역학 등 물리 파라미터를 정의한다. Isaac Lab에서 삽입 각도·초기 위치·부품 공차를 도메인 랜덤화(Domain Randomization)로 변화시키며 수천 개 병렬 시나리오로 학습한다.\n• 배포 및 정제 단계: 학습된 정책이 AWS IoT Greengrass를 통해 로봇 컨트롤러에 배포되고, 실제 생산 중 힘 센서, 조인트 인코더 데이터가 AWS로 실시간 스트리밍된다. 실제 마찰이 시뮬레이션보다 크거나 공차 편차가 범위를 벗어나면 sim-to-real gap이 발생하며, SageMaker가 재학습을 진행한다.\n• 결과: 정제된 모델을 재배포하여 성공률이 향상됐고, 새로운 변동이 발생하면 자동 재학습이 시작된다.\n이 사례는 동일한 아키텍처가 정밀 매니퓰레이션, 모바일 로봇 내비게이션, 휴머노이드 로봇 등 다양한 영역으로 확장 가능함을 보여준다."
}
도메인 랜덤화: 시뮬레이션 일반화를 위한 핵심 기법
{
"converted_text": "본문에서 강조하는 도메인 랜덤화(Domain Randomization)는 시뮬레이션에서 학습한 정책이 실제 환경에 잘 일반화되도록 하는 핵심 기법이다.\n• 물리 파라미터 변화: 훈련 중 마찰 계수, 재료 탄성, 질량 분포, 중력 값 등을 체계적으로 변화시켜 모델이 다양한 조건에 적응하도록 함\n• 환경 조건 다양화: 조명 조건, 배경 질감, 카메라 노이즈, 센서 지연 등을 랜덤화하여 실제 센서의 불완전성을 시뮬레이션에 반영함\n• 작업 파라미터 변화: 삽입 각도, 초기 위치, 부품 공차 등 작업별 파라미터를 다양화하여 강건한 정책(Robust Policy)을 학습함\n이 기법의 핵심은 시뮬레이션 내에서 다양한 변동성을 경험하게 함으로써, 실제 배포 시 마주칠 수 있는 미지의 상황에도 적응할 수 있는 범용적인 정책(Generalizable Policy)을 얻는 것이다. 이는 제로샷 학습(Zero-Shot Learning)의 기반으로, 사전 훈련된 모델을 새로운 태스크에 적용 가능하게 한다."
}