칼만 필터(Kalman Filter)를 예제를 통해 쉽게 배우세요!
by DD
3개월 전
조회수 24
칼만 필터(Kalman Filter)는 불확실성(Uncertainty) 환경에서 시스템 상태를 추정하고 예측하는 알고리즘임
객체 추적(Object Tracking), 항법, 로봇 공학, 금융 시장 분석 등 다양한 분야에 광범위하게 활용됨
수학적 복잡성을 줄이고 실제 예시(Real-world Examples)를 통해 직관적인 이해를 돕는 접근 방식을 제시함
1차원 레이더 추적 예시(Radar Tracking Example)를 통해 칼만 필터의 작동 원리를 단계별로 설명함
칼만 필터(Kalman Filter)의 핵심 개념
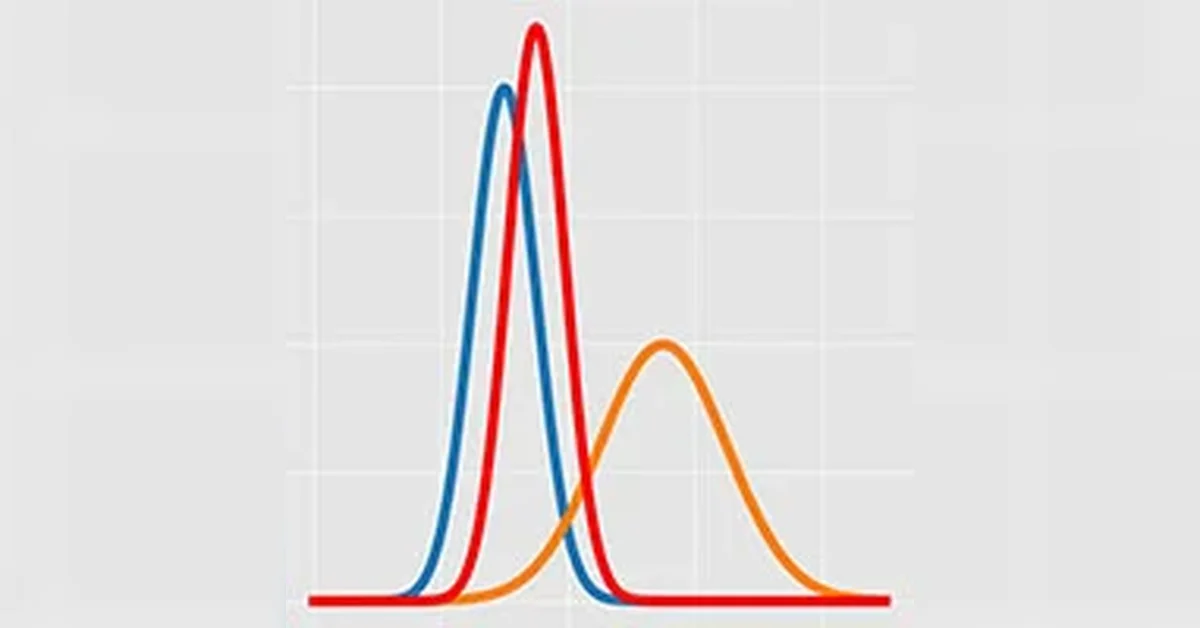
칼만 필터(Kalman Filter)는 측정 잡음(Measurement Noise)과 프로세스 잡음(Process Noise)을 고려하여 시스템의 상태를 추정하고 예측하는 데 사용되는 재귀적 알고리즘이다. 특히, 레이더 추적 시스템과 같이 불확실성이 존재하는 환경에서 최적의 상태 추정(Optimal State Estimation)을 제공한다. 칼만 필터는 예측(Prediction)과 업데이트(Update) 단계를 반복하며, 각 단계에서 측정값과 예측값을 결합하여 보다 정확한 상태 추정 결과를 도출한다.
1차원 레이더 추적 예시 분석
게시물에서는 1차원 레이더를 이용한 항공기 추적 예시를 통해 칼만 필터의 동작 원리를 설명한다. 초기화(Initialization) 단계에서 레이더 측정값을 기반으로 초기 상태를 추정하고, 예측(Prediction) 단계에서는 시스템의 동적 모델(Dynamic Model)을 사용하여 다음 상태를 예측한다. 이후, 업데이트(Update) 단계에서 새로운 측정값을 예측값과 결합하여 최종 상태를 추정한다. 이 과정에서 칼만 이득(Kalman Gain)을 사용하여 측정값과 예측값의 가중치를 결정하고, 추정의 불확실성을 최소화한다.
칼만 필터(Kalman Filter)의 수식 및 구현
칼만 필터(Kalman Filter)는 상태 추정(State Estimation)을 위해 다양한 수식을 사용한다. 특히, 상태 예측 방정식, 공분산 예측 방정식, 칼만 이득 방정식, 상태 업데이트 방정식, 공분산 업데이트 방정식 등이 핵심이다. 게시물에서는 이러한 수식들을 예시와 함께 설명하여 이해를 돕는다. 수치적 예시(Numerical Examples)를 통해 각 단계별 계산 과정을 상세히 보여주며, Python 및 MATLAB 코드(Code)를 제공하여 실제 구현을 지원한다.
칼만 필터(Kalman Filter)의 실제 적용 시 고려 사항
칼만 필터(Kalman Filter)를 실제 시스템에 적용할 때는 여러 가지 사항을 고려해야 한다. 특히, 측정 잡음과 프로세스 잡음의 특성을 정확하게 파악하고, 시스템의 동적 모델을 적절하게 설계하는 것이 중요하다. 또한, 초기화 방법과 칼만 이득의 선택이 필터의 성능에 큰 영향을 미칠 수 있다. 게시물에서는 이상치 처리(Outlier Treatment)와 같은 실용적인 문제 해결 방법도 제시하며, 비선형 칼만 필터(Nonlinear Kalman Filters)에 대한 간략한 소개도 제공한다.