3D 회전, 오일러 각(Euler Angles)의 함정을 피하는 방법
3D 그래픽스, 로보틱스 등에서 오일러 각(Euler Angles)은 직관적이지만, 계산 시 주의가 필요함
축 순서(Axis Order), 내/외적 회전(Intrinsic/Extrinsic Rotations), 능동/수동 회전(Active/Passive Rotations) 등 임의적 선택 사항에 대한 문서화가 중요함
오일러 각(Euler Angles)의 미분값은 각속도(Angular Velocity)와 다르며, 짐벌락(Gimbal Lock) 현상에 유의해야 함
쿼터니언(Quaternion) 사용을 통해 짐벌락(Gimbal Lock) 문제를 해결하고, 내부 연산의 안정성을 확보할 수 있음
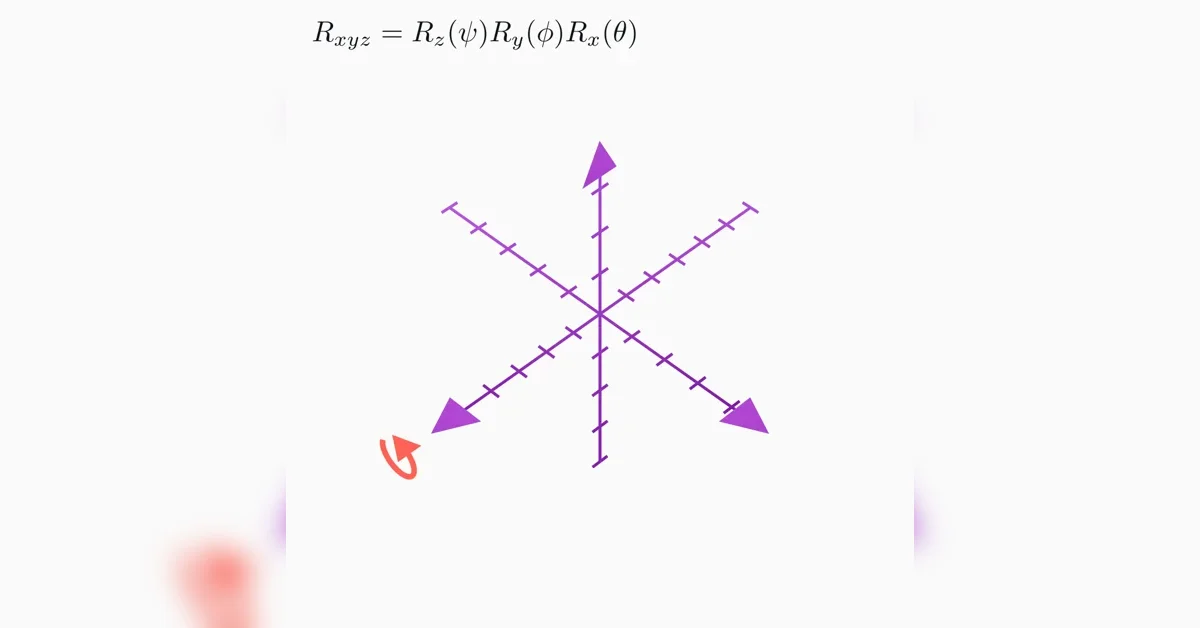
축 순서(Axis Order)의 중요성
오일러 각(Euler Angles)은 회전을 세 개의 축(X, Y, Z)을 기준으로 분해하지만, 축의 순서에 따라 결과가 달라진다. 예를 들어 ZYX와 XYZ 축 순서는 동일한 회전 각도를 사용하더라도 최종 방향이 다르다. 따라서 프로젝트 내에서 일관된 축 순서를 유지하고, 사용된 축 순서를 명확히 문서화(Documentation)하는 것이 중요하다. 이는 코드의 가독성을 높이고, 다른 개발자와의 협업 시 혼란을 방지하는 데 기여한다.
내적/외적 회전(Intrinsic/Extrinsic Rotations)의 이해
내적 회전(Intrinsic Rotation)은 회전이 회전된 축을 기준으로 발생하고, 외적 회전(Extrinsic Rotation)은 고정된 축을 기준으로 발생한다. 이 두 가지 방식의 혼동은 축 순서를 반대로 사용하는 것과 동일한 결과를 초래할 수 있다. 따라서, 어떤 회전 방식을 사용할지 결정하고, 이를 명확하게 문서화(Documentation)해야 한다. 이는 코드의 정확성을 보장하고, 디버깅 시간을 단축하는 데 도움이 된다.
능동/수동 회전(Active/Passive Rotations)의 구분
능동 회전(Active Rotation)은 객체가 고정된 좌표계 내에서 회전하는 것을 의미하고, 수동 회전(Passive Rotation)은 객체가 고정된 상태에서 좌표계가 회전하는 것을 의미한다. 이 두 가지 표현 방식은 동일한 회전을 나타내지만, 해석 방식에 차이가 있다. 능동/수동 회전 간의 변환은 단순히 역회전을 적용하는 것으로 가능하다. 따라서, 응용 분야에 적합한 방식을 선택하고, 그 선택을 문서화(Documentation)하는 것이 중요하다.
오일러 각(Euler Angles) 미분과 짐벌락(Gimbal Lock)
오일러 각(Euler Angles)의 미분값은 객체의 각속도와 같지 않으며, 특히 짐벌락(Gimbal Lock) 현상으로 인해 수치적 불안정성이 발생할 수 있다. 짐벌락(Gimbal Lock)은 회전 시 특정 축이 정렬되어 자유도가 감소하는 현상으로, 계산 오류를 유발할 수 있다. 따라서, 오일러 각(Euler Angles)은 로깅(Logging) 및 직렬화(Serialization)에만 사용하고, 내부 연산에는 회전 행렬(Rotation Matrix) 또는 쿼터니언(Quaternion)을 사용하는 것이 권장된다.