엣지 AI로봇, 클라우드와 만나 더 똑똑해지다!
by DD
3개월 전
조회수 48
Physical AI 시스템은 엣지(Edge)와 클라우드(Cloud)를 융합하여 물리적 세계와 상호작용하며, 밀리초 단위의 응답성을 요구함
Strands Agents, Bedrock AgentCore, Claude 4.6, NVIDIA GR00T, Hugging Face LeRobot 등 다양한 기술을 활용하여 AI 에이전트 개발을 지원함
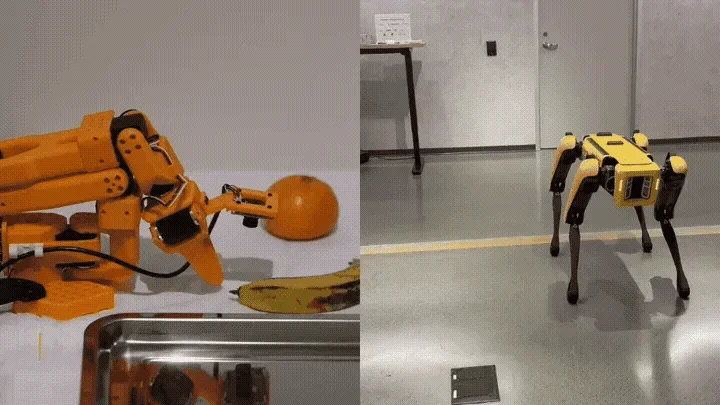
NVIDIA Jetson 엣지 하드웨어에서 VLA 모델을 실행하여 물체 조작 및 자율 제어 시연
엣지에서는 빠른 응답성을, 클라우드에서는 대규모 연산 능력을 활용하는 하이브리드 아키텍처(Hybrid Architecture)를 제안함
AgentCore Memory를 통해 플릿(Fleet) 전반의 학습과 개선을 가능하게 하며, Amazon SageMaker를 활용한 모델 학습 및 배포를 지원함
엣지-클라우드 연속체(Edge-Cloud Continuum) 아키텍처
Physical AI 시스템은 엣지(Edge) 디바이스의 빠른 응답성과 클라우드(Cloud)의 대규모 연산 능력을 결합하는 하이브리드 아키텍처를 활용한다.
엣지: NVIDIA Jetson과 같은 엣지 하드웨어에서 VLA(Vision-Language-Action) 모델을 실행하여 밀리초 단위의 제어 수행
클라우드: AgentCore Memory를 통해 장기적인 맥락을 유지하고, Amazon SageMaker를 활용하여 모델 학습 및 플릿(Fleet) 전반에 적용
트레이드오프: 엣지에서는 계산 능력의 제약이 있으며, 클라우드와의 통신 지연 시간(Latency)은 실시간 제어에 병목으로 작용
이러한 아키텍처는 자율주행차(Autonomous Vehicle)의 실시간 장애물 회피와 창고 자동화(Warehouse Automation)의 다단계 작업 계획을 동시에 가능하게 한다.
VLA(Vision-Language-Action) 모델의 역할
NVIDIA GR00T와 같은 VLA 모델은 시각 인식, 언어 이해, 행동 예측을 통합하여 로봇의 물리적 동작을 제어한다.
입력: 카메라 이미지, 로봇 관절 위치, 언어 지시를 입력으로 받아 새로운 관절 위치(Joint Position)를 직접 출력
작동 방식: “과일을 집어서 바구니에 넣어”라는 지시를 받으면, 모델은 사과와 바구니를 인식하고 로봇의 관절 움직임을 생성
장점: 밀리초 단위의 정밀 제어를 통해 로봇이 주변 환경과 상호작용하며, 실시간으로 변화하는 환경에 적응
VLA 모델은 엣지 환경에서 실행되어야 하며, Hugging Face LeRobot과 같은 하드웨어 추상화 도구와 결합하여 로봇 제어 작업을 단순화한다.
Strands Agents와 에이전트-애즈-툴(Agent-as-Tool) 패턴
Strands Agents는 AI 에이전트 개발을 위한 통합 인터페이스를 제공하며, 엣지-클라우드 환경에서 유연한 시스템 구축을 지원한다.
엣지 에이전트: Ollama와 함께 Qwen3-VL과 같은 모델을 로컬에서 실행하여 엣지 디바이스의 빠른 응답성을 활용
클라우드 에이전트: BedrockModel을 사용하여 Claude Sonnet 4.6과 같은 강력한 추론 능력을 가진 모델을 활용
에이전트-애즈-툴(Agent-as-Tool) 패턴: 엣지 에이전트가 클라우드 에이전트에 복잡한 작업을 위임하거나, 클라우드 오케스트레이터가 여러 엣지 디바이스를 조율
이러한 유연성은 다양한 로봇 시스템(Robot System)의 요구사항을 충족하며, 엣지-클라우드 간의 효율적인 협업을 가능하게 한다.
플릿(Fleet) 전반의 학습과 개선
AgentCore Memory는 여러 엣지 디바이스가 공유하는 지식을 저장하고, 이를 통해 시스템 전체의 성능을 향상시킨다.
집단 지능: 각 로봇이 관찰한 내용을 공유 메모리에 저장하여, 단일 로봇으로는 감지할 수 없는 패턴을 파악
예시: 북쪽 복도에서 발생하는 내비게이션 실패의 원인을 분석하고, 모델 개선에 반영
지속적 개선: AgentCore Observability를 통해 추론 → 시뮬레이션/행동 → 관찰 → 평가 → 최적화의 피드백 루프를 구축
Amazon SageMaker는 대규모 병렬 시뮬레이션과 모델 학습을 지원하며, NVIDIA Isaac Sim**과 같은 시뮬레이터를 활용하여 로봇의 안전한 학습 환경을 제공한다.
Physical AI 시스템 구축의 과제
Physical AI 시스템 구축은 엣지 디바이스의 제한된 자원, 클라우드와의 통신 지연 시간, 그리고 복잡한 시스템 통합과 같은 여러 과제를 안고 있다.
엣지 디바이스: 계산 능력 및 메모리 제약으로 인해 모델 최적화가 필수적이며, 저전력 설계를 고려해야 함
통신: 5G, Wi-Fi 6E 등 빠른 통신 기술을 활용하여 지연 시간을 최소화하고, 데이터 전송량 최적화 필요
시스템 통합: 다양한 하드웨어 및 소프트웨어 컴포넌트 간의 호환성 문제와 보안 취약점에 대한 대비
이러한 과제들을 해결하기 위해, 모듈화된 아키텍처(Modular Architecture), 표준화된 인터페이스(Standardized Interface), 그리고 지속적인 테스트(Continuous Testing)가 중요하다.